
 Je viens d’inventer mon premier robot NXT. Et comme je voulais garder une trace de ce robot (certains, à la maison, lorgnent la boîte d’un air concupiscent), j’ai cherché (et trouvé) un moyen de graver dans le marbre disque dur un modèle Lego : Lego propose son Lego Digital Designer, que j’ai trouvé assez bluffant.
Je viens d’inventer mon premier robot NXT. Et comme je voulais garder une trace de ce robot (certains, à la maison, lorgnent la boîte d’un air concupiscent), j’ai cherché (et trouvé) un moyen de graver dans le marbre disque dur un modèle Lego : Lego propose son Lego Digital Designer, que j’ai trouvé assez bluffant.
Voici donc la page de mon blog qui recense tous mes modèles (c’est à dire 1 pour l’instant …) : https://www.bergeret.org/blog/modeles-legos/
On peut coupler le tout avec une carte mère de PC, installer un OS temps réel, et commencer à lui apprendre des trucs (et pourquoi pas, le coupler à une webcam, micro, etc.) ?
Commentaire by Emmanuel DESVIGNE — 3 février 2010 @ 14:59
Pas loin …
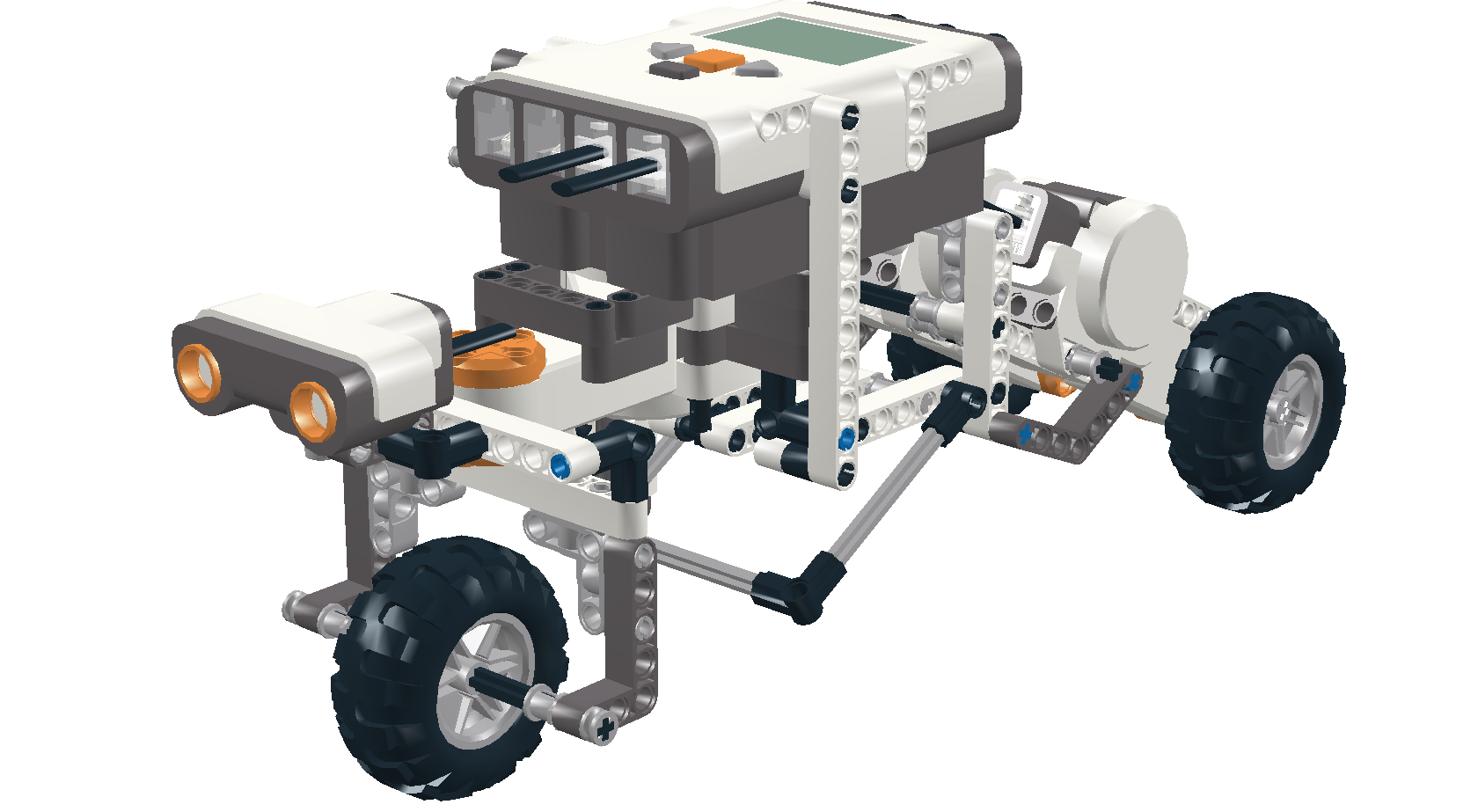
La grosse boîte qu’il a sur le dos, c’est une micro ARM 32 bits, avec 256ko de flash, 64ko de RAM, pédalant à 48MHz.
T’as un chipset Blutooth, un port USB, un haut parleur.
Dans les capteurs fournis, t’as un capteur de distance (echolocalisation par ultra-son, c’est ce qui fait les yeux du modèle), un de luminosité, un de contact, un de son. Les moteurs sont des servo-moteurs, qui peuvent être piloté très précisément (tu peux leur dire de tourner de 34°, de manière synchrone)…
De base, tu le programmes avec un langage graphique, genre programmation d’automate), soit, en téléchargeant des softs, avec un langage goût C.
Ensuite, si tu changes le fimware de la bête, tu peux programmer en C (avec compilo croisé), et Java (!) et faire du vrai temps réel !
Commentaire by Fabien — 3 février 2010 @ 16:30